SPECS crea un robot basat en el cervell complet d'un rosegador per ser emprat com a model experimental en recerca
SPECS crea un robot basat en el cervell complet d'un rosegador per ser emprat com a model experimental en recerca
DAC-X, el primer robot d'aquestes característiques. Treball que ha estat dirigit per Paul Verschure i que publica a l’edició avançada en línia de la revista Neural Network.
Els models cerebrals normalment aborden subcomponents i subsistemes relativament petits. Fins al moment no havia estat possible demostrar com treballen junts aquests subsistemes en un cervell viu que funciona en un món real.
Ara, per primera vegada, investigadors del Grup de Recerca SPECS (Sistemes Sintètics, Perceptius, Emotius i Cognitius) de la UPF han tingut èxit en la realització d’un model cerebral complet de rosegador, en un robot capaç de controlar el seu comportament a temps real.
Això s’ha aconseguit gràcies a un programa de recerca interdisciplinari, dirigit per Paul Verschure, professor d’investigació ICREA del Departament de Tecnologies de la Informació i les Comunicacions (DTIC) i director del Grup de Recerca SPECS al Centre de Sistemes Autònoms i Neurorobòtics (N-RAS) de la UPF, que combina la neurociència, la psicologia, la intel·ligència artificial i la robòtica. És fruit del treball d’investigació que Verschure està duent a terme durant més de vint anys sobre la teoria del Control Adaptatiu Distribuït (DAC, Distributed Adaptative Control) de la ment i el cervell.
 La teoria del Control Adaptatiu Distribuït proposa que, en el món real, els animals s’ocupen de les tasques vitals com ara l’obtenció d’aliments, satisfent cinc objectius d’alt nivell que responen a les qüestions “com”, “per què”, “què”, “on” i “quan”, allò que Verschure ha anomenat: “el problema H4W” (Verschure, 2012).
La teoria del Control Adaptatiu Distribuït proposa que, en el món real, els animals s’ocupen de les tasques vitals com ara l’obtenció d’aliments, satisfent cinc objectius d’alt nivell que responen a les qüestions “com”, “per què”, “què”, “on” i “quan”, allò que Verschure ha anomenat: “el problema H4W” (Verschure, 2012).
Aquest comportament complex passa per saber on s’ha d’anar i quan s’ha de sortir a buscar els recursos, què buscar, on i quan s’ha de tornar a la base, la manera d’evitar els obstacles i com actuar per tal de satisfer les necessitats internes. Els investigadors s’han preguntat “de quina manera el cervell i els principis neuronals subjacents poden explicar aquests comportaments complexos i la seva coordinació?”.
El DAC-X aporta informació sobre com es coordinen les àrees cerebrals
La recerca duta a terme pels membres d’SPECS, Giovanni Maffei, Diogo Santos-Pata, Encarnación Marcos, Martí Sánchez-Fibla, sota la direcció de Paul Verschure, ha estudiat com operen i es realitzen els paradigmes fonamentals d’aprenentatge del condicionament clàssic en els sistemes centrals del cervell, cerebel, hipocamp i escorça cerebral. Fins ara s’havien elaborat models biològicament limitats d’aquests sistemes.
Els autors, per primera vegada han aconseguit ajuntar tots aquests components en el model DAC-X i han obtingut nous coneixements sobre com es coordina la interacció entre els sistemes cerebrals. El model DAC-X, a més de ser únic a nivell biològic, també ho és per la capacitat que té de controlar un robot a temps real facilitant amb això la comprensió de les dinàmiques realistes del cervell en el món real.
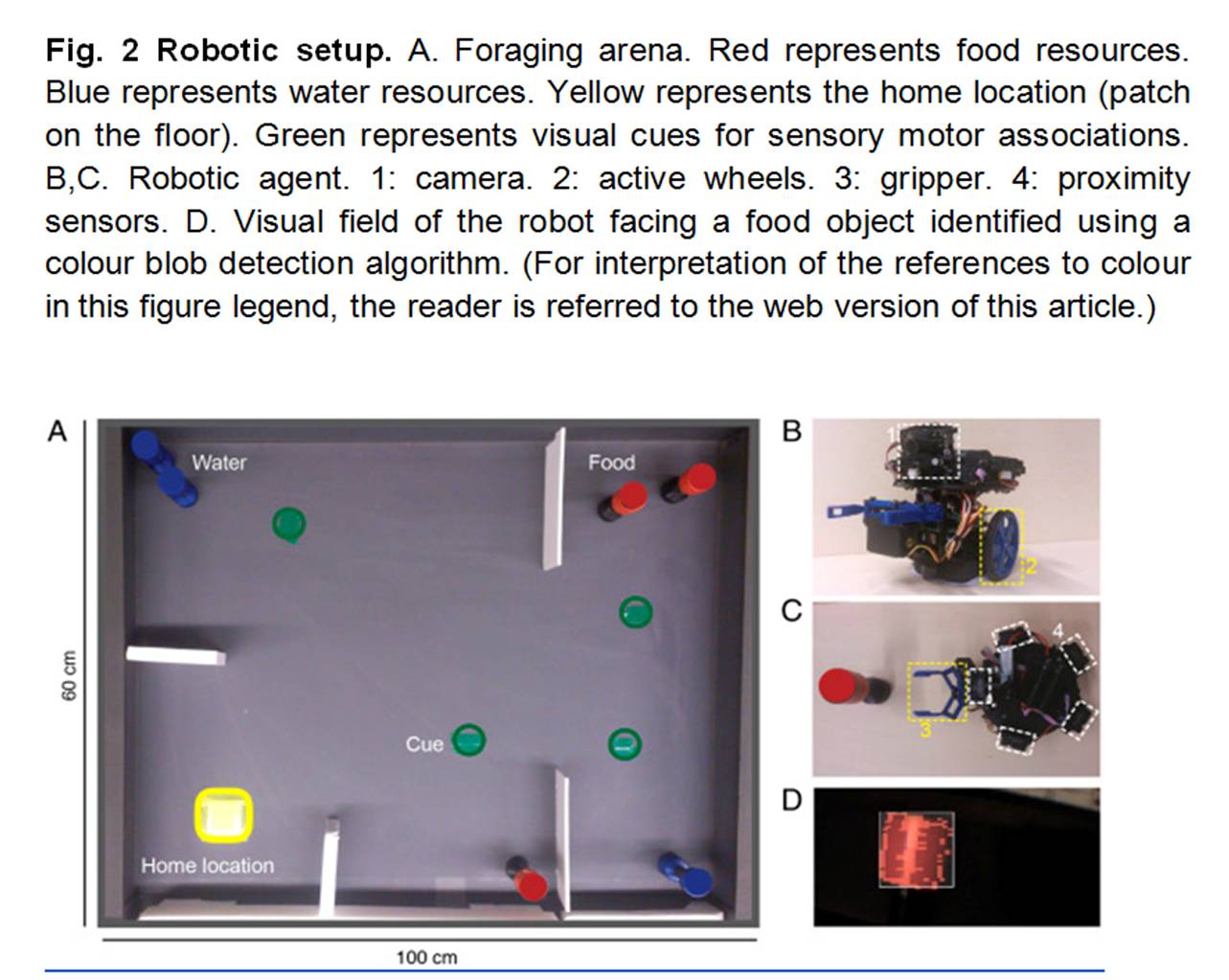 Comportament del robot en la cerca i acaparament de nutrients
Comportament del robot en la cerca i acaparament de nutrients
Els experiments del robot DAC-X se centren en el seu comportament fonamental de subsistència, cerca i acaparament de nutrients. Els experiments fets amb robots mòbils mostren que un agent que s’hagi d’alimentar en un entorn desconegut haurà d’adquirir diversos tipus de coneixement, haurà d’establir associacions sensoriomotores, i adoptar reptes i estratègies per aconseguir els seus objectius.
En particular, l’agent amb el temps aprèn a dependre dels senyals ambientals locals per trobar recursos que li siguin útils, per a la qual cosa adquireix les habilitats de planificació de navegació que donen suport a la presa de decisions eficients, la qual cosa condueix a un augment de l’eficiència del comportament en termes de cost-recompensa.
El model DAC-X mostra en detall com actuen simultàniament els sistemes cerebrals centrals implicats en aquesta complexa tasca, que els autors descriuen en aquesta seqüència:
“L’hipotàlem dicta les necessitats dominants, el cerebel configura els patrons d’acció específics per negociar amb l’entorn, l’hipocamp fa les simulacions internes de rutes potencials i l’escorça cerebral prefrontal ajusta els objectius específics de comportament”.
Aquest treball dóna llum sobre les sinèrgies que s’estableixen entre els múltiples sistemes d’aprenentatge cerebrals i també de com aquests mecanismes descrits podrien explicar conductes observades en rosegadors i altres mamífers.
L’objectiu del DAC-X, i per extensió de la resta de models derivats de la teoria DAC, és aconseguir entendre el funcionament del cervell a través de la robòtica, tant en la salut com en la malaltia, per avançar tant en el camp de la robòtica, com per aconseguir millors diagnòstics i intervencions per a la pràctica clínica.
El grup SPECS ja ha donat passos en aquesta direcció amb el desenvolupament del Rehabilitation Gaming System (RGS), un sistema de realitat virtual orientada a la rehabilitació motora de les extremitats superiors de persones afectades de diferents graus de dèficits neurològics.
Reconeixements:
La investigació que porta a aquests resultats ha rebut finançament del Consell Europeu de Recerca dins el Setè Programa Marc de la Unió Europea (FP7/2007-2013)/ acord de subvenció del CEI núm. 341.196] CDAC, Setè Programa Marc de la Comissió Europea ([7PM/ 2007-2013] en virtut d'acord de subvenció núm. [612.139])WYSIWYD, Setè Programa Marc de la Comissió Europea ([FP7/2013-2016] en virtut d'acord de subvenció núm. [601.167]) el CSN II i Horitzó 2020 socSMC de la Comissió Europea (amb el número de l'acord: socSMC-641321H2020-FETPROACT-2014).
Treball de referencia:
Giovanni Maffei, Diogo Santos-Pata, Encarnación Marcos, Martí Sánchez-Fibla, Paul FMJ Verschure (2015), “An embodied biologically constrained model of foraging: From classical and operant conditioning to adaptive real-world behavior in DAC-X“, Neural Network, 30 d’octubre.