Dmytro Derkach, Adrià Ruiz and Federico Sukno (CMTech) won the FG2017 Head Pose Estimation Challenge at FG2017
Dmytro Derkach, Adrià Ruiz and Federico Sukno (CMTech) won the FG2017 Head Pose Estimation Challenge at FG2017
Dmytro Derkach, Adrià Ruiz and Federico Sukno (CMTech) won the FG2017 Head Pose Estimation Challenge at FG2017 with a system that is able to estimate head pose using only depth information from consumer RGB-D cameras such as Kinect 2
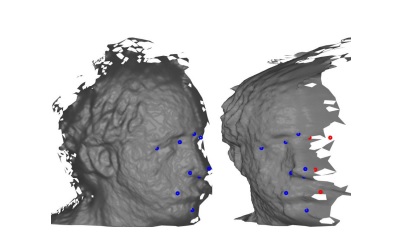
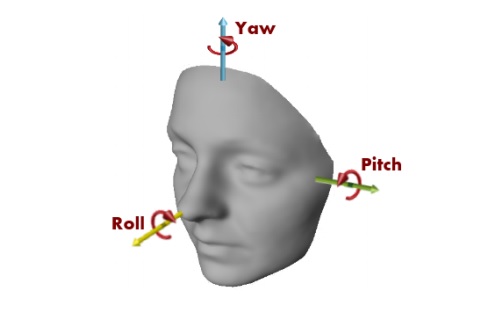
The authors, members of the Cognitive Media Technologies Group at our Department, presented a system that is able to estimate head pose using only depth information from consumer RGB-D cameras such as Kinect 2. In contrast to most approaches addressing this problem, they do not rely on tracking and produce pose estimation in terms of pitch, yaw and roll angles using single depth frames as input. The system combines three different methods for pose estimation: two of them are based on state-of-the-art landmark detection and the third one is a dictionary-based approach that is able to work in especially challenging scans where landmarks or mesh correspondences are too difficult to obtain.
They evaluated the system on the SASE database, which consists of ~30K frames from 50 subjects. They obtained average pose estimation errors between 5 and 8 degrees per angle, achieving the best performance in the FG2017 Head Pose Estimation Challenge. Full code of the developed system is available on-line.