Laboratories
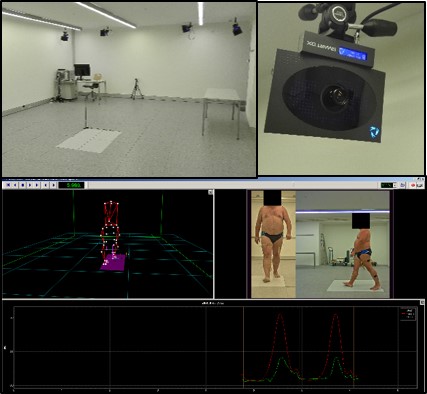
This lab uses a marker-based optical tracking technology and has been established at UPF by the Biomechanics and Mechanobiology area.
-
Eight infrared cameras with 1.5 MP resolution at 250 fps, and has the capacity to detect maker displacements inferior to 0.1 mm in an acquisition volume of 4x4x3 m3.
-
Synchronised with video cameras and two force plates, for integrated biomechanical analyses of human body motions.
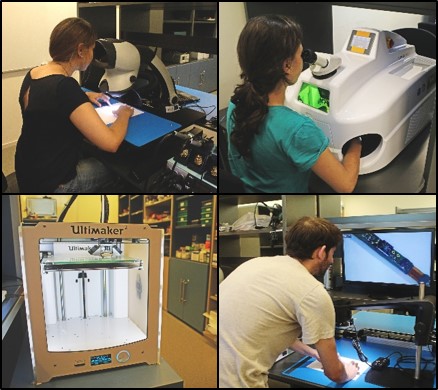
- Electronics test bench with standard equipment (digital oscilloscopes, multimeters power supplies and function generator). Wet bench behind.
- Electronic assembly bench with visual inspection microscope which provides 3D imaging for manipulation and miniaturized soldering tasks. Rework station with hot air iron, solder iron and desolder iron.
- General view of the BERG electronics lab
- 3D printer (Ultimaker 2)
- 3D carving CNC machine for rapid prototyping
- High precision welding laser system with smart spot technology for repeatable welding processes.
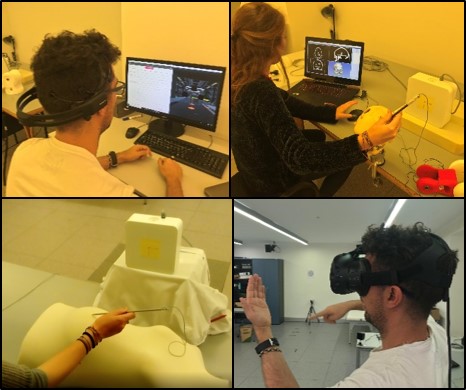
- VIVE Virtual Relaity System
- Emotiv Epoc + helmet for human brain research
- Electromagnetic Tracking Systems Aurora

The Full-Body Interaction Lab is focussed on understanding the underlying principles supporting the benefits from Full-Body Interaction in all the application spectrum. It also provides infrastructure and support for designing, developing and assessing real world applications especially in the areas of Play, Learning and Special Needs and especially for children.
-
HD Floor-based Interactive System: Floor projection system with a tiled portable screen of 6x6 meters. Total projection resolution: 1920x1920 pixels.
-
Tracking system: computer vision based on four colour cameras which track lit colour markers. Transportable.
-
Interactive Slide Exertion Interface Platform: Large inflatable slide (8x8x4m) augmented with interactive technology. Large projection area 4x3 meters. Computer Vision based tracking system working with infra red camera and lighting.
-
Large Multi-touch & Full-body Interaction Screen: 3x2 meters rear-projection reflection-based multi-touch screen for full body interaction.

-
Demo workstation including an early prototype of the KaleiVoiceCope voice transformation technology developed by the Music Technology and commercialized since 2011 by the spin-off company Voctro Labs.
-
Demo and meeting space
-
Reactable musical instrument, a tangible multitouch table for live performance and creation of music. Reactable was first developed at the Music Technology Group and since 2009 is commercialized by the spin-off company Reactable Systems.
Robotics- Distributed Computing and Artificial Intelligence Lab
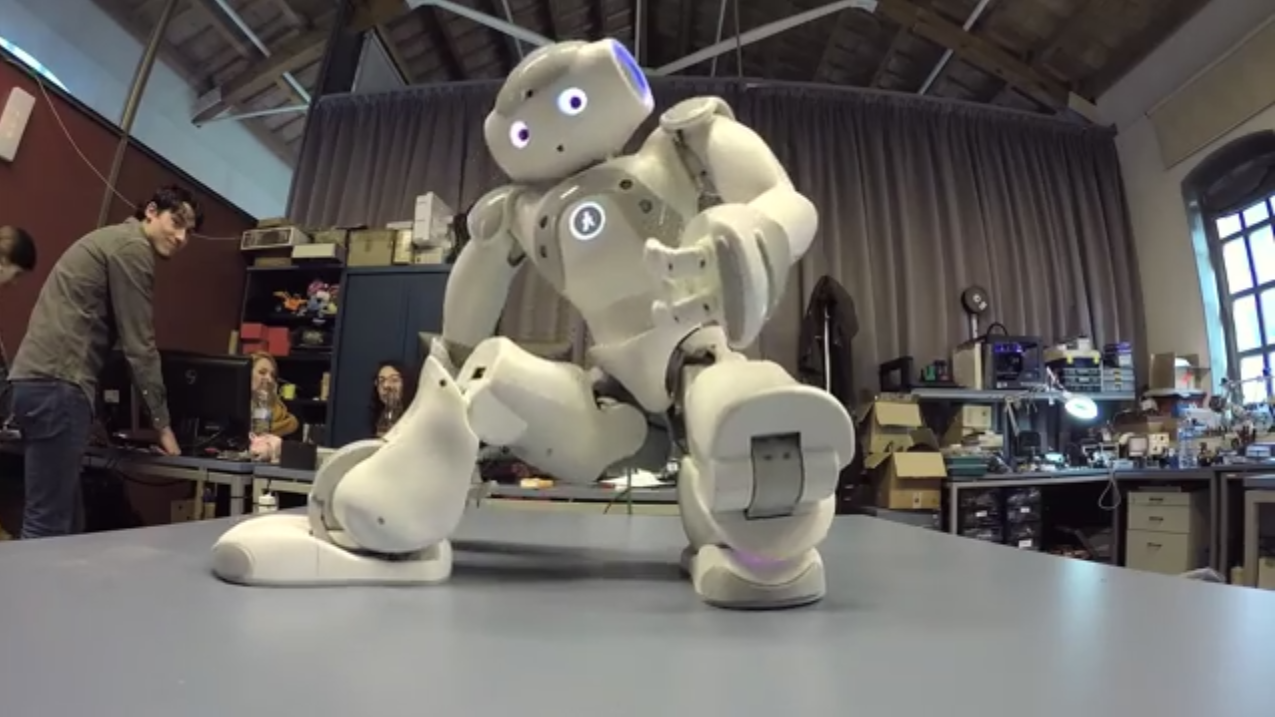
The UPF robotics lab has a set of custom made mobile robots (equipped with AI vision cameras), also self-balancing ones and humanoid robots: a Pepper Robot, five NAO V5 and three NAO v6.
The Pepper Robot is used for human-robot interaction and dual.arm robot learning setups. The NAO robots have been used in robot-robot interactive scenarios to study multi-agent collaborative tasks.

The Brain cluster comprises 37 computer nodes and 1 login node. From July 2018 have been added 13 new nodes, one of them with capacity for GPUs, and one new frontend node.
Each one of the new nodes has two 2,1 Ghz Intel Xeon E5-2684 16-core processors with 256 GB of RAM, and 1TB of local disk storage.
The last 24 nodes has two 2-GHz Intel Xeon E5 2650 8-Core processors with 32 GB of RAM, and 300 GB of local disk storage.
Furthermore, each node has access to a network file system, providing more than 25 TB of disk storage with an automatic backup system for the main partitions.
All the machines in the cluster are interconnected by a high-speed network with an load balance system at 10GB of speed
Behavioral laboratory (CBCLaB)



All the rooms have a control area where the researcher accompanies the participant at all times and, depending on the room’s characteristics, are used for different types of studies:
Rooms A, B, C and D, which have electromagnetic isolation (Faraday cage), are mainly used for electroencephalographic recordings.
Rooms O, N, M and L, larger rooms, are used for studies with children and babies.
The rest of the rooms are used for behavioral studies with adults.
All rooms have:
- Acoustic insulation of about 55dB
- Rubber flooring that favors noise damping
- Air conditioning independent from the rest of the building which we control and is installed to minimize the background noise.
- Adjustable LED lighting, and
- Isolated communication network that allows communication between machines without external influence
We can apply different techniques in this research space:
- Event-related potential (ERP) recording
- Transcranial magnetic stimulation (TMS)
- Eye tracking
- Vibrotactile studie