Foetal Surgery
Twin-to-twin transfusion syndrome (TTTS) is a complication of monochorionic twin pregnancies in which arteriovenous vascular communications in the shared placenta lead to blood transfer between the fetuses. This syndrome is caused by the presence of small anastomoses in the placenta vasculature that let the twins exchange an unbalanced blood flow
The most effective treatment of severe TTTS is fetoscopy laser photocoagulation and it consists in closing blood vessels connecting the twins. Nevertheless, in up to 33% of operated pregnancies, some inter-twin vascular connections remain open causing a recurrence of the TTTS.
TTTS surgery is very complex and risky because of several constraints to the fetal clinical setting. Firstly, the placenta position, size and shape greatly vary between pregnancies. Secondly, there is a tiny space to move the fetoscope and the field-of-view is limited. Thirdly, the exact localization of the vessels to coagulate is usually not known ahead of surgery. If the surgeon is not able to reach and coagulate all the anastomoses, reentry in a different point is not allowed (i.e., one-shot procedure), as it is associated with high mortality. Hence, the choice of the entry point is the most critical factor of the intervention as it directly affects the fetoscope maneuverability and the possibility to reach all the anastomoses. Preoperative planning is thus an essential prerequisite to increase survival rates for severe TTTS
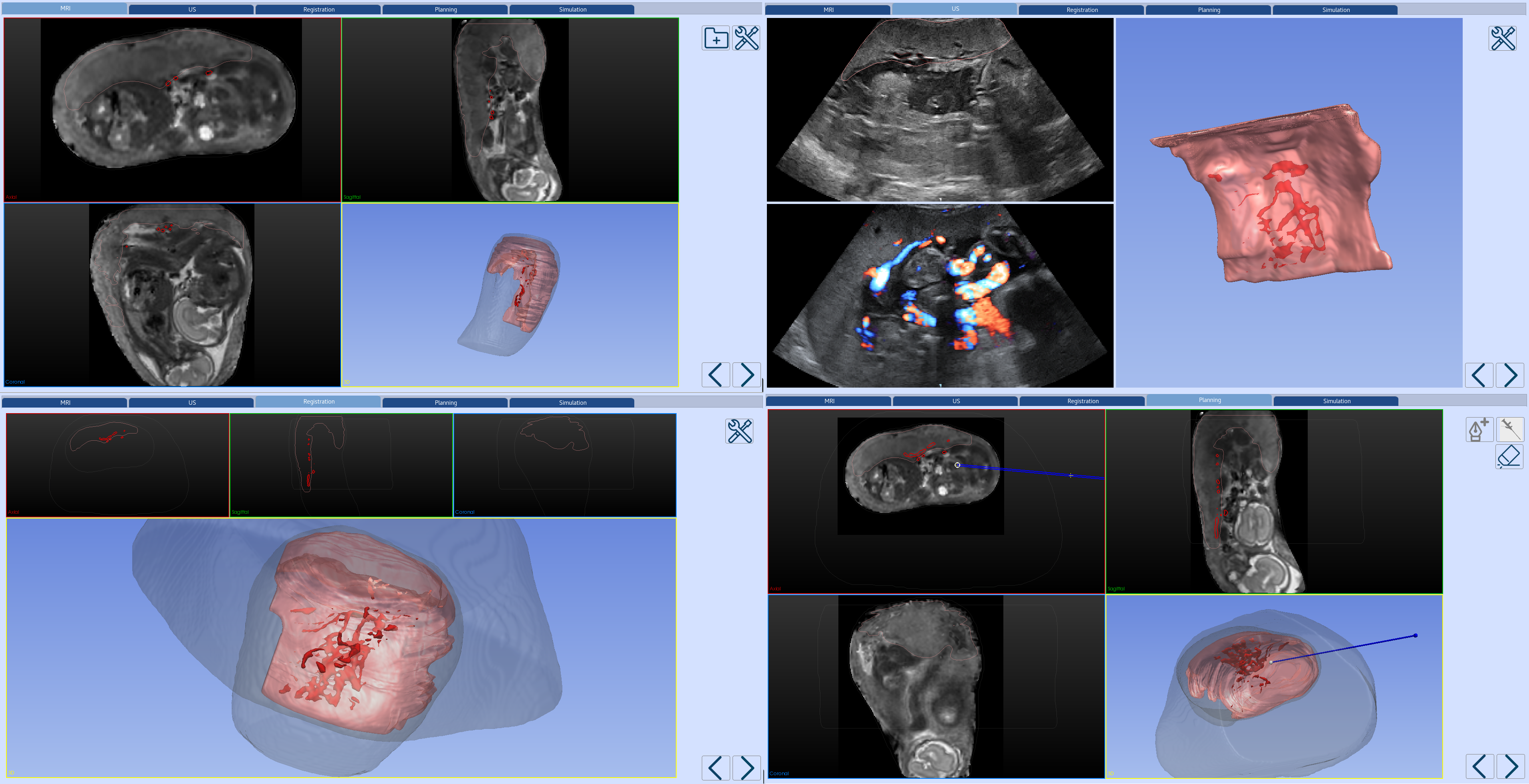
At BCN MedTech we are working in the first TTTS planning software oriented to clinical use. The main objective of this application is to enable doctors ahead of TTTS surgery by knowing the correct entry point of the fetoscope, the movements and the estimation of an approximate trajectory that will traverse the vascular hemisphere. In short, this software aims to increase the success rate and survival of both twins.
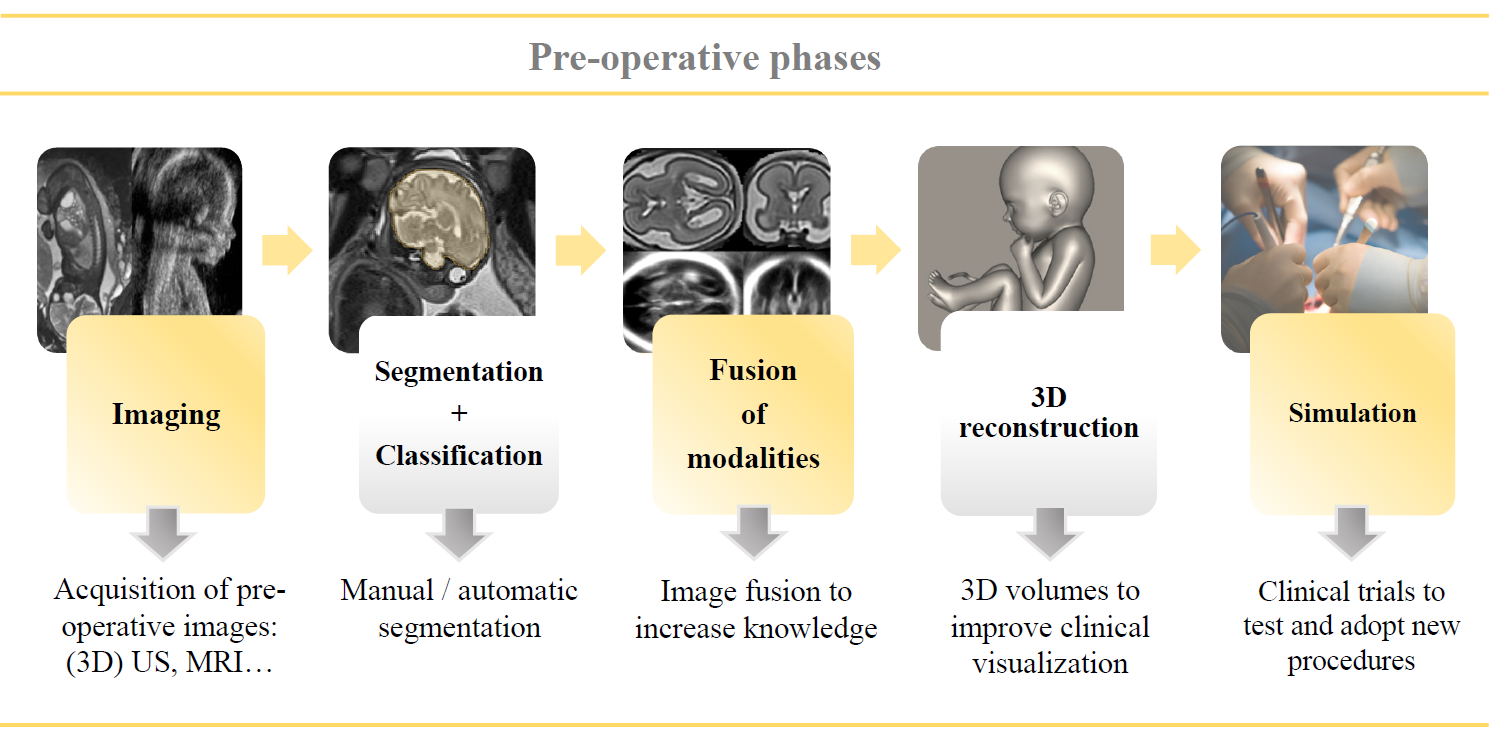
In this planning software, novel computer vision and deep learning algorithms are integrated to create a 3D model of the womb including the placenta and its vascular tree, and the umbilical cord of both twins, extracted from MRI and 3D US. The fetoscope entry point is estimated taking into account the cord insertions located on the placenta surface. Our framework is also capable to simulate the movements of the fetoscope and the camera visualization to explore the entire placenta volume.
Therefore, our TTTS planning software can aid fetal surgeons to know more about the intrauterine environment, determine a suitable entry point, train the fetoscope movements before the intraoperative phase, and consequently, successfully improve the performance rate and reduce the surgery time.